|
I am a Ph.D student in the Computer Vision Lab at Seoul National University (SNU), advised by Kyoung Mu Lee. My research focuses on 3D vision, particularly 3D reconstruction and generation. I have served as a reviewer/program committee for CVPR, ECCV, ICCV, NeurIPS, AAAI, and TPAMI. I interned at the Intelligent Multimedia Group within Microsoft Research Asia during the winter of 2021. During my undergraduate studies, I majored in Electrical and Computer Engineering at the same university and participated in various projects, such as developing embedded systems on robots and sounding rockets (detailed in the Team Project and Mini Project section). In my master course, I focused on research in visual-inertial odometry, leveraging inertial measurement units (IMUs). Email / Google Scholar / GitHub / LinkedIn |

|
⬇️ Hover for videos!
|
|

|
Jaeyoung Chung*, Suyoung Lee*, Jianfeng Xiang, Jiaolong Yang, Kyoung Mu Lee Project page / Paper / ArXiv / Code Map2World expands arbitrary segment maps into coherent 3D worlds and enhances them with fine details, leveraging strong priors of a 3D asset generative model. |

|
Jaeyoung Chung*, Hyunjin Son*, Kyoung Mu Lee Project page / Paper / ArXiv / Code A generative photomosaic framework that synthesizes structure-aligned mosaics and supports few-shot personalized creation. |
|
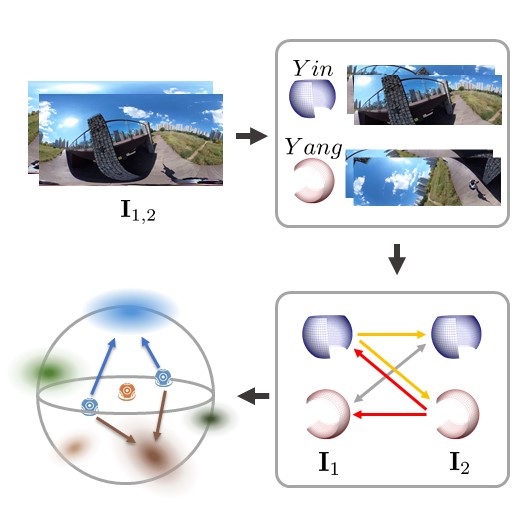
Suyoung Lee*, Jaeyoung Chung*, Kihoon Kim, Jaeyoo Huh, Gunhee Lee, Minsoo Lee, Kyoung Mu Lee IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 CVPR 2025 Highlight Paper Project page / Paper / ArXiv / Code We propose a method to construct a holistic 3D Gaussian splatting scene using a feed-forward network by structure-driven bridging of perspective-trained model to 360-degree image via the Yin-Yang grid. |
|
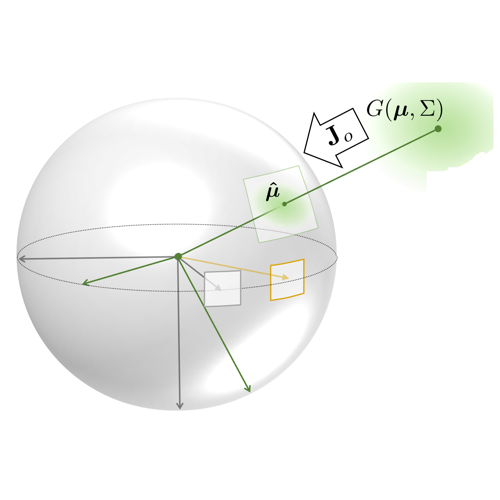
Suyoung Lee*, Jaeyoung Chung*, Jaeyoo Huh, Kyoung Mu Lee Conference and Workshop on Neural Information Processing Systems (NeurIPS), 2024 Project page / Paper / ArXiv / Code We introduce a method to optimize Gaussian splatting with 360 panorama images, considering omnidirectional camera model. |

|
Jaeyoung Chung*, Suyoung Lee*, Hyeongjin Nam, Jaerin Lee, Kyoung Mu Lee IEEE Transactions on Visualization and Computer Graphics (TVCG), 2025 Project page / Paper / ArXiv / Code We developed a 3D Gaussian splatting scene generation pipeline that iteratively generates and aligns parts of the scene. |
|
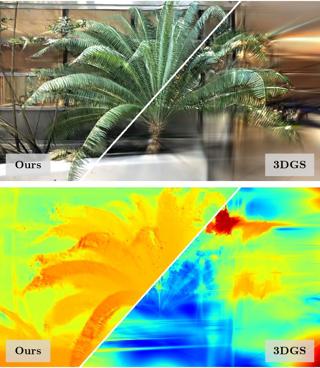
Jaeyoung Chung, Jeongtaek Oh, Kyoung Mu Lee IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshop (CVPRW), 2024 Best Paper Runner-up Awards (Cert. & Link) Project page / Paper / ArXiv / Code We introduce a method to optimize Gaussian splatting with a limited image set, mitigating overfitting by incorporating a estimated depth map as a geometric guide. |
|
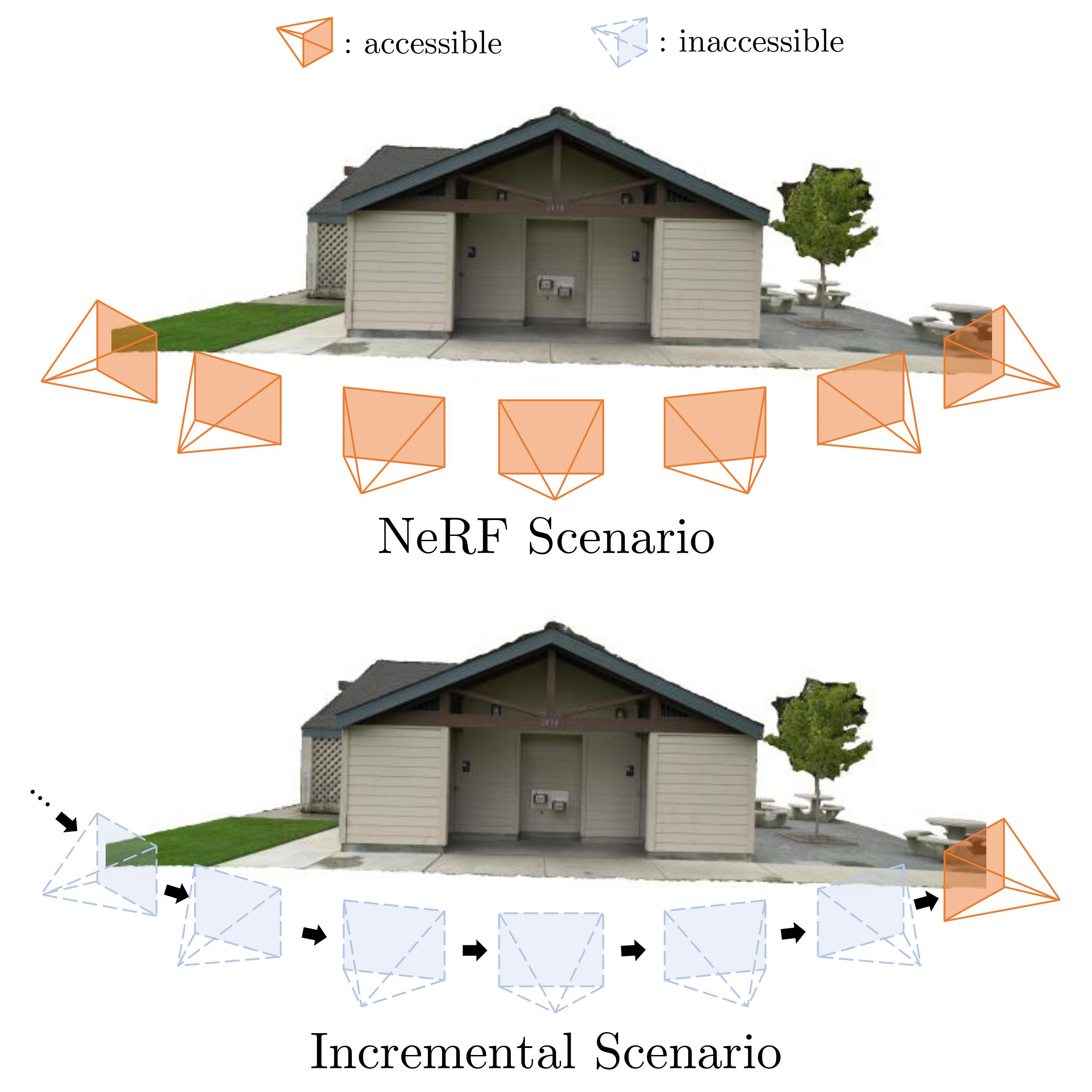
Jaeyoung Chung, Kanggeon Lee, Sungyong Baik, Kyoung Mu Lee IEEE Access, 2025 Project page / Paper / ArXiv / Code We study the incremental learning scenario in Neural Radiance Fields (NeRF) first time and propose a self-distillation-based method alleviating catastrophic forgetting without memory increasing. |
|
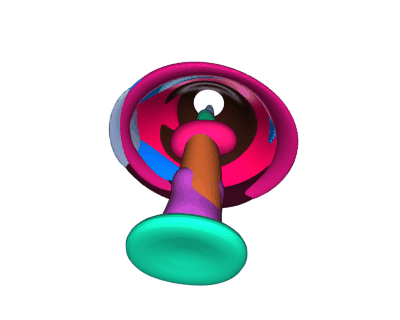
Mohsen Yavartanoo*, Jaeyoung Chung*, Reyhaneh Neshatavar, Kyoung Mu Lee International Conference on Computer Vision (ICCV), 2021 Project page / Paper / ArXiv / Video / Code We propose a constrained implicit algebraic surface as the primitive with few learnable coefficients and higher geometrical complexities. |
|
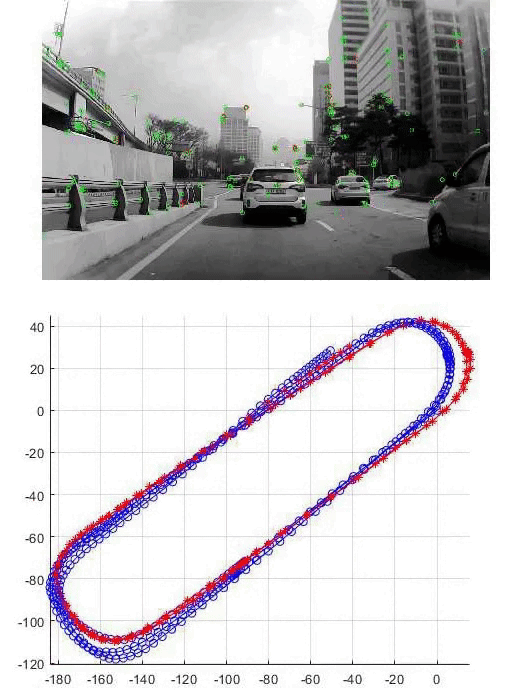
Jae Hyung Jung, Jaehyuck Cha, Jae Young Chung, Tae Ihn Kim, Myung Hwan Seo, Sang Yeon Park, Jong Yun Yeo, Chan Gook Park IEEE Transactions on Intelligent Transportation Systems, 2020 Paper Jaehyuck Cha, Jae Hyung Jung, Jaeyoung Chung, Tae Ihn Kim, Myung Hwan Seo, Sang Yeon Park, Jong Yun Yeo, Chan Gook Park IEEE/ION Position, Location and Navigation Symposium (PLANS), 2020 Paper Jae Hyung Jung, Jaeyoung Chung, Jaehyuck Cha, Chan Gook Park IEEE 15th International Conference on Control and Automation (ICCA), 2019 (oral) Paper We propose a precise navigation system using wheel odometry, Low-Grade inertial measurement unit, and monocular camera in Urban Area. VIO Simluation code (Pended) |
|
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
 |
|
{kind=link}
|
|

|
Jaeyoung Chung, Daehwan Kim, Beom Park, Soobeom Heo, Deokhyun Kim, and other Hanaro Team members Gold prize in Contest held by The National Universities' Rocket Association (NURA) (Link), summer 2017 Hanaro Homepage / Promotion Video / 2016 NURA Video / 2017 NURA Video / Code (rocket pin control) / Data (recorded INS data during rocket flight) We develop whole solid sounding rockets from engine, fuel, body, electric system including wing control, parachute control, ignition control, data(pressure, accel, rotation) measurement, and communication system. I was a leader of electric system team. (2016 ~ 2017) |
|
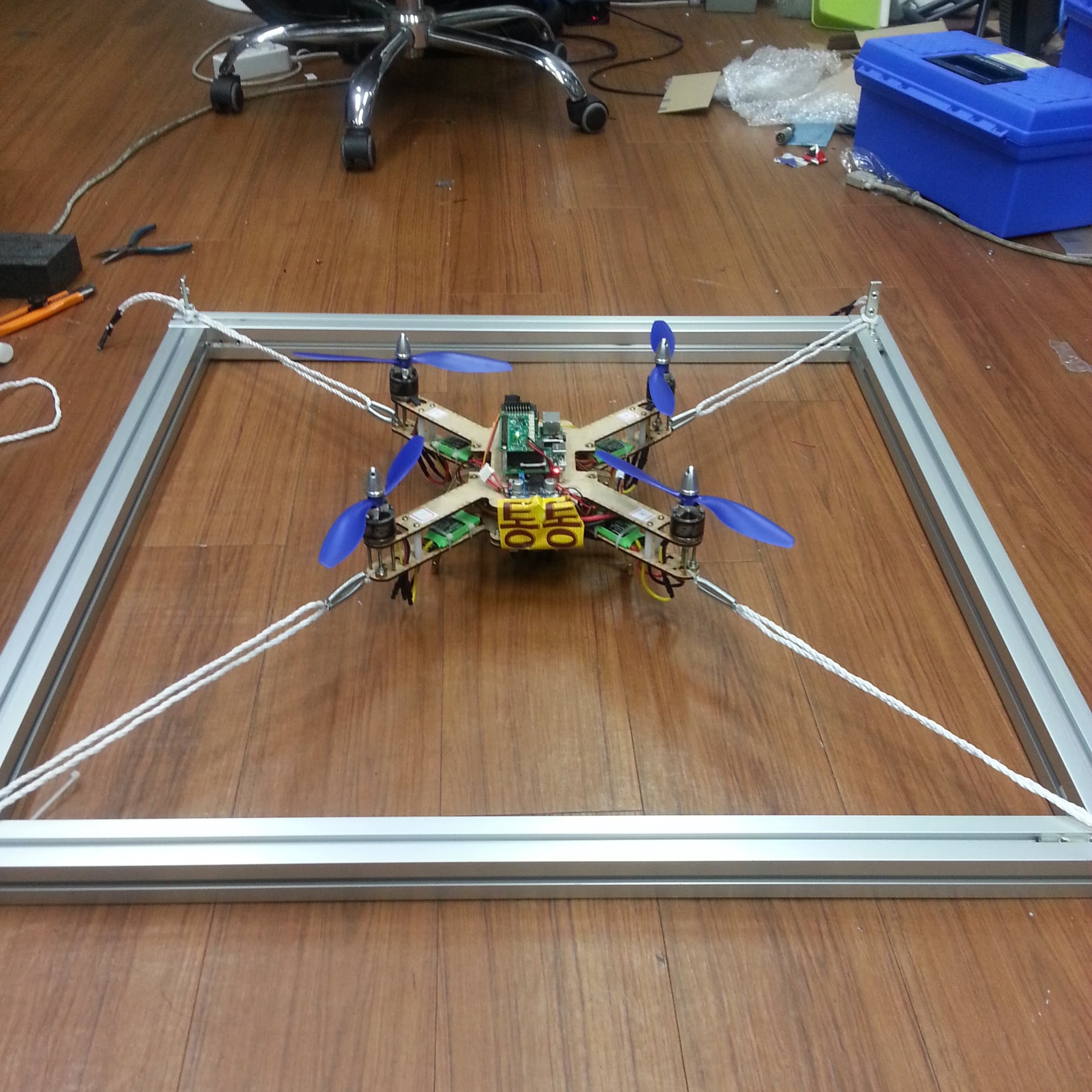
Yongjae Kim, Jaeyoung Chung, Joonyoung Jang, Chanyoung Jung Spring - Fall 2016 Code (ROS) / Code (GPS/INS, Kalman Filter) We develop the whole system of quadcopter drone from scratch and try to control some complex movement by utilizing reinforcement learning. |

|
Taehyung Kim, Jaeyoung Chung, Jigang Kim, Hyerin Choi, Kevin Nam First prize in Dongbu Award for SNU Creative Design Fair (Cert. & Link), summer and fall 2015 Poster / Video We develop an electronic bicycle with an interchangeable front wheel between motor-powered wheel and normal. We design the motor control system deliberately for similar user experiences with pedal assistance system (PAS). I mainly develop embedded system and algorithm including power, circuit, PID control, etc. |
|
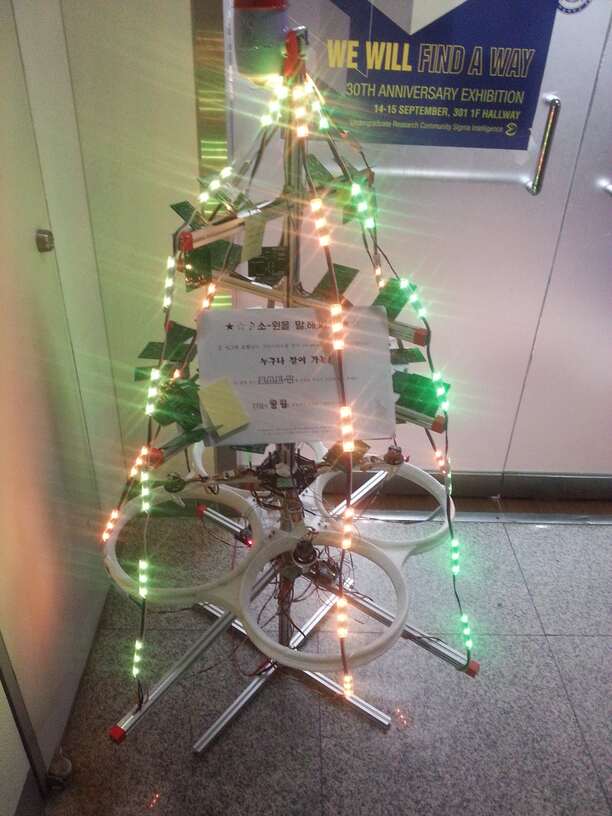
Jaeyoung Chung Chrismas season, 2015 I made this tree out of discarded materials including green pcb-boards (as leaf), shiny light LED arrays, a drone that reacts when approached, and a blower that floats a ping-pong ball |
|
|
Handmade RCcar |
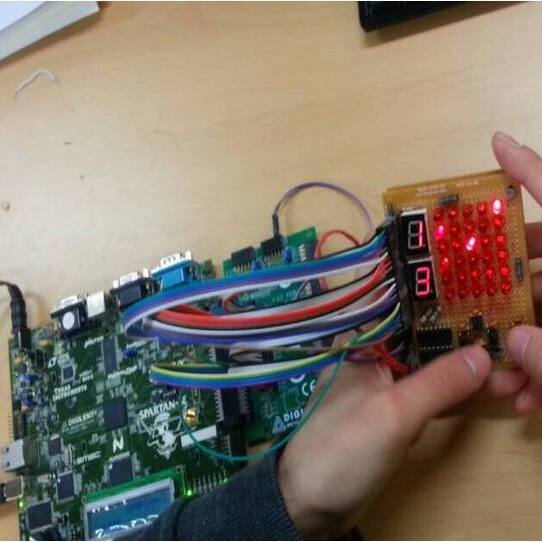
LogicDesigned TankGame |
Pulsejet-powered Cart |

Finger-controlled Carnival Board |
|
|

Riding Bicycle |

Formula 1 |

Skiing |

Brazilian Jiu-Jitsu |
|
I borrow this format from Ben Mildenhall website. |